ответ:Зависимость x1(t) и x2(t) - это линейные функции, следовательно графиком будет являться прямая, значит тебя движутся равномерно. Начальные координаты тел: x01 = 10 м х02 = 4 м Проекции скоростей (в данной задаче они же и модули скоростей) Vx1 = 2 м/с Vx2 = 5 м/с Тела встретились, значит х1=х2 10 + 2t = 4 + 5t 3t = 6 t = 2 с Теперь, чтобы найти координату точки встречи, подставим найденное t в любое уравнение движения. Если в первое: х = 10 + 2t = 10 + 2*2 = 14 м Если во второе: х = 4 + 5t = 4 + 5*2 = 14 м
Объяснение:
Составляем систему b3 + b5 = 90 b2 + b4 = -30 Преобразовываем b3 + b3*(q^2) = 90 b2 + b2*(q^2) = -30 Выносим общий член за скобки b3*(1 + q^2) = 90 b2*(1 + q^2) = -30 Делим первое уравнение на второе b3 / b2 = -3 b3 = b2 * -3 b3 = b2 * q, то есть q = -3 Подставляем q во второе уравнение системы b2*(1 + (-3)^2) = -30 b2 * 10 = -30 b2 = -3 Находим b1 b2 = b1 * q b1 = b2 / q b1 = -3 / -3 = 1 Находим сумму 6-ти членов по формуле Sn = b1*(q^n - 1) / (q - 1) S6 = 1*((-3)^6 - 1) / (-3 -1) = 728 / -4 = -182 или S6 = 1-3+9-27+81-243 = -182 Проверка условия 9 + 81 = 90 -3 - 27 = 30 ответ: Сумма первых 6-ти членов равна -182
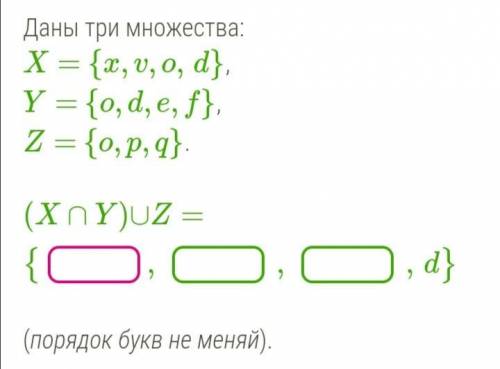
X*Y= o, d
(X*Y)+Z=o, p, q, d
Ваш ответ: o, p, q