Два тела движутся из состояния покоя навстречу друг другу с одинаковым модулем ускорения 2м/с .расстояние между телами в начальный момент времени 200 м.
Если нужно найти время, то представляем систему ОХ. для первого тела х1=аt^2/2, а для второго х2=х0-аt^2/2. Так как они встретятся в одной точки то х1=х2, а значит аt^2/2=x0-at^2/2, подставляем известные числа получаем t^2=200-t^2, переносим все в одну строну 200-2t^2=0. А дальше решаем уравнение и получаем t= 10 cекунд.
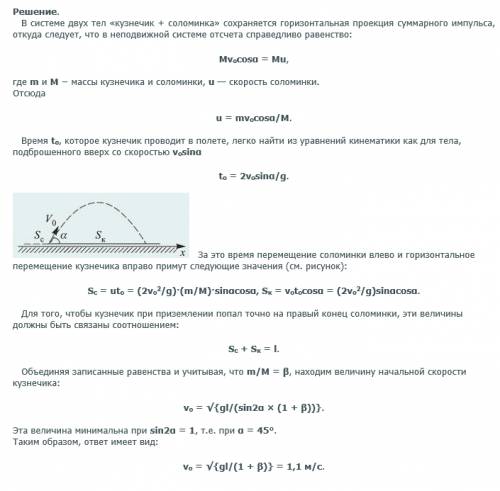
Решение. В системе двух тел «кузнечик + соломинка» сохраняется горизонтальная проекция суммарного импульса, откуда следует, что в неподвижной системе отсчета справедливо равенство: Mvocosα = Mu, где m и М − массы кузнечика и соломинки, u — скорость соломинки. Отсюда u = mvocosα/М. Время to, которое кузнечик проводит в полете, легко найти из уравнений кинематики как для тела, подброшенного вверх со скоростью vosinα to = 2vosinα/g. За это время перемещение соломинки влево и горизонтальное перемещение кузнечика вправо примут следующие значения (см. рисунок): Sc = uto = (2vo2/g)·(m/M)·sinαcosα, Sк = votocosα = (2vo2/g)sinαcosα. Для того, чтобы кузнечик при приземлении попал точно на правый конец соломинки, эти величины должны быть связаны соотношением: Sc + Sк = l. Объединяя записанные равенства и учитывая, что m/М = β, находим величину начальной скорости кузнечика: vo = √{gl/(sin2α × (1 + β))}. Эта величина минимальна при sin2α = 1, т.е. при α = 45°. Таким образом, ответ имеет вид: vo = √{gl/(1 + β)} = 1,1 м/с.
Рассмотрим твердое тело, как некую систему (рис. 6.1), состоящую из n точек (m1, m2, ..., mn); – радиус-вектор i-й точки, проведенный из точки О – центра неподвижной инерциальной системы отсчета. Введем обозначения: – внешняя сила, действующая на i-ю точку, – сила действия со стороны k-й точки на i-ю. Рис. 6.1 Запишем основное уравнение динамики для точки (см. п. 3.6):Умножим обе части этого уравнения векторно на :Знак производной можно вынести за знак векторного произведения (и знак суммы тоже), тогда Векторное произведение вектора точки на её импульс называется моментом импульса (количества движения) этой точки относительно точки О. . (6.1.1) Эти три вектора образуют правую тройку векторов, связанных «правилом буравчика» (рис. 6.2). Рис. 6.2 Векторное произведение , проведенного в точку приложения силы, на эту силу, называется моментом силы : . (6.1.2) Обозначим Li – плечо силы Fi, (рис. 6.3). Учитывая тригонометрическое тождество, получаем . (6.1.3) Рис. 6.3C учетом новых обозначений: . (6.1.4) Запишем систему n уравнений для всех точек системы и сложим их левые и правые части:Здесь сумма производных равна производной суммы:где – момент импульса системы, – результирующий момент всех внешних сил относительно точки О. Так как, то Отсюда получим основной закон динамики вращательного движения твердого тела, вращающегося вокруг точки. . (6.1.5) Момент импульса системы является основной динамической характеристикой вращающегося тела. Сравнивая это уравнение с основным уравнением динамики поступательного движения (3.6.1), мы видим их внешнее сходство.