Точка движется по окружности радиусом r = 30 см с постоянным угловым ускорением тангенциальное ускорение а^ точки, если известно, что за время t= 4 с онасовершила три оборот
Дано R=0,3 м N=3 t=4c a - ? тангенциальное ускорение можно найти из формулы S = a*t^2/2 где S = 3*L= 3* 2*π*R=3*6,28*0,3=5,652 м a = 2*S/t^2=2*5,652/4=2,826 м/с2
Втавить пропускиВы уже знакомы со многими физическими величинами, которые применяются в • • • • • • • • (динамике) . Это, например, мера гравитационных и инертных свойств тела – • • • • • (масса) , мера действия одного тела на другое в отношении возникновения ускорения – • • • •(сила) , мера действия одного тела на другое в отношении совершаемого перемещения – • • • • • • (?) . Динамика – это • • • • • •(раздел) физики, изучающий причины движения тел, ставящий целью предсказать • • • • • • • •(характер) движения, если известны действующие на тело силы и его начальные • • • • • • •(значения) : координаты и • • • • • •(величину ?) скорости. Поскольку движение тел выглядит по-разному с точек зрения различных • • • • • • • • • • • • (систем отсчета) , необходимо выбрать такую • • • • • • •(систему) отсчёта, в которой законы динамики будут верны. Развитие физики показало, что • • • • • • • • • •(существуют) так называемые
• • • • • • • • • • • •(инерциональные) системы отсчёта, в которых любое тело, на которое не действуют другие тела, будет вечно • • • • • • • • •(сохранять) свою скорость. Это утверждение называется • • • • • •(первым) законом Ньютона и означает, что при • • • • • • • • • • (уравновешивании, компесации) сил движение тела будет зависеть только от его начальных условий – координат и вектора • • • • • • • •(скорости) . Инерциальные системы отсчёта лишь • • • • • • • •(справедливы ) при рассмотрении свободных тел, а далее • • • • • • • • • • • (?) для любых тел. Именно в инерциальных СО будут справедливы основные • • • • • •(законы) динамики.
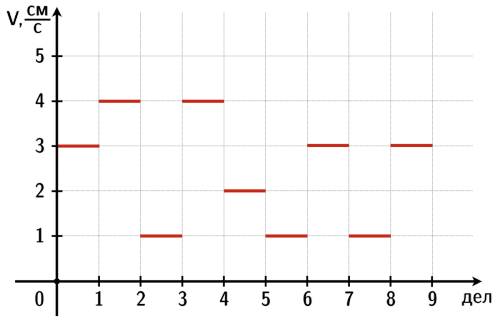
 тогда мы можем выразить время, которое тратит жук на прохождение расстояния между
тогда мы можем выразить время, которое тратит жук на прохождение расстояния между 










 поскольку мы изначальнго определили
поскольку мы изначальнго определили 

 см
см
тангенциальное ускорение можно найти из формулы
S = a*t^2/2
где S = 3*L= 3* 2*π*R=3*6,28*0,3=5,652 м
a = 2*S/t^2=2*5,652/4=2,826 м/с2