Объяснение:
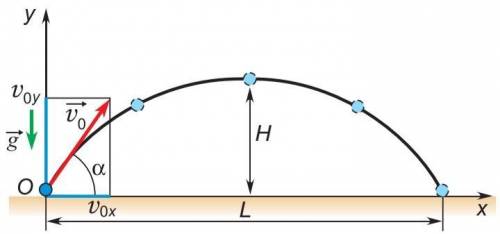
1) форму параболы ( с вершиной параболы в высшей точке траектории )
2) В начале движения тела с начальной скоростью ( v0 ) проекция которой на ось Ох ( v0x ) равна ( v0cosα ) , a на ось Оу ( v0y ) равна ( v0sinα )
В высшей точки траектории vy = 0 м/с
Поэтому
0 = v0sinα - gt
отсюда
tп. ( время подъема ) = t = ( v0sinα ) / g
Дальность полёта тела будет вычисляться как
L = vxtпол.
Где tпол. ( полное время движения ) = 2tп. = ( 2v0sinα ) / g
L = ( v0cosα2v0sinα ) / g
2sinαcosα = sin2α , поэтому
L = ( v0²sin2α ) / g
Но sin90° = 1 , поэтому если α = 45° , то sin2α = 1
Поэтому именно при угле бросания равным 45° будет максимальная дальность полета
3) В наивысшей точке траектории скорость тела сонаправлена с осью горизонта , поэтому угол между горизонтом и вектором скорости тела в данный момент времени равен 0°
Так как траекторией движения тела брошенного под углом является парабола тогда в конечной точке траектории угол между горизонтом и вектором направления направления скорости будет равен углу между вектором начальным скорости и горизонтом .
Объяснение:
1) форму параболы ( с вершиной параболы в высшей точке траектории )
2) В начале движения тела с начальной скоростью ( v0 ) проекция которой на ось Ох ( v0x ) равна ( v0cosα ) , a на ось Оу ( v0y ) равна ( v0sinα )
В высшей точки траектории vy = 0 м/с
Поэтому
0 = v0sinα - gt
отсюда
tп. ( время подъема ) = t = ( v0sinα ) / g
Дальность полёта тела будет вычисляться как
L = vxtпол.
Где tпол. ( полное время движения ) = 2tп. = ( 2v0sinα ) / g
L = ( v0cosα2v0sinα ) / g
2sinαcosα = sin2α , поэтому
L = ( v0²sin2α ) / g
Но sin90° = 1 , поэтому если α = 45° , то sin2α = 1
Поэтому именно при угле бросания равным 45° будет максимальная дальность полета
3) В наивысшей точке траектории скорость тела сонаправлена с осью горизонта , поэтому угол между горизонтом и вектором скорости тела в данный момент времени равен 0°
Так как траекторией движения тела брошенного под углом является парабола тогда в конечной точке траектории угол между горизонтом и вектором направления направления скорости будет равен углу между вектором начальным скорости и горизонтом .
Отметим заряды как q1, q2. Неизвестный заряд (помещённый) - q3. Расстояния: от q1 до q2 - R, от q1 до q3 - R1.
Если система в равновесии, то силы, действующие на шарик, равны.
Отсюда:
k*q1*q3/R1^2=k*q2*q3/(R-R1)^2;
q1/q2=R1^2/(R-R1)^2;
R1/(R-R1)=(q1/q2)^(1/2);
R-R1=R1*(q2/q1)^(1/2);
R=R1(1+(q2/q1)^(1/2));
R1=R/(1+(q2/q1)^(1/2));
Проверку единиц измерения делать не буду.
R1=0,04/(1+(1/9)^(1/2))=4/(40/3)=0,03 м, т.е. 3 см.
ответ: поместить надо в расстоянии 3 см от более заряженного шарика и в 1 см от менее заряженного.