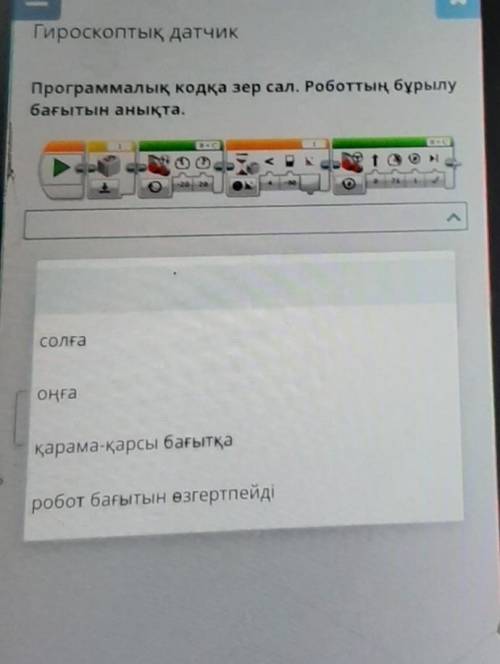
Солга вроде
Объяснение:
Робототехника опирается на такие дисциплины, как электроника, механика, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, медицинскую робототехнику.
Примерно к 1930-м годам появились андроиды, реализующие элементарные движения и произносить по команде человека простейшие фразы. Одной из первых таких разработок стала конструкция американского инженера Д. Уэксли, созданная для Всемирной выставки в Нью-Йорке в 1927 году. Как в звездных воинах)
В 1950-х годах появились механические манипуляторы для работы с радиоактивными материалами. Они были копировать движения рук оператора, который находился в безопасном месте.
К 1960-му году были проведены разработки дистанционно управляемых колёсных платформ с манипулятором, телекамерой и микрофоном.
В 1954 году американским инженером Д. Деволом был запатентован метод управления погрузочно-разгрузочным манипулятором с сменных перфокарт,потом в 1956 году совместно с Д. Энгельбергером им была создана первая в мире промышленная компания «Юнимейшн» по производству промышленной робототехники.
В 1962 году вышли в свет первые в США промышленные роботы «Версатран» и «Юнимейт», причём некоторые из них функционируют до сих пор, преодолев порог в 100 тысяч часов рабочего ресурса.
Объяснение:
Солға
Объяснение:
100%