Роботтың айналу бұрышын немесе айналу жылдамдығын өлшеуге арналған. Датчик корпусының жоғарғы жағында сенсор жұмыс істейтін жазықтықты көрсететін екі көрсеткі бар. Сондықтан сенсорды роботқа дұрыс орнату маңызды. Сондай-ақ, дәлірек өлшеу үшін гироскопиялық сенсорды бекіту оның робот корпусына қатысты қозғалғыштығын болдырмауы керек. Роботтың түзу қозғалысы кезінде де гироскопиялық сенсор бұрыш пен айналу жылдамдығын өлшеу кезінде қате жинай алады, сондықтан өлшеудің алдында ток датчигінің көрсеткішін 0 қалпына келтіру керек. Роботты сағат тіліне қарсы айналдыру теріс өлшеу мәндерін тудырады, ал сағат тілімен айналдыру оң өлшемдерді тудырады. 2. Қозғалыс датчиктері
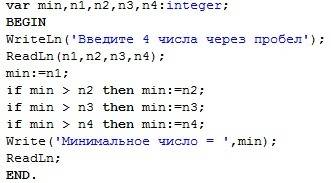
Объяснение:
a, b, c: integer;
begin
readln(a, b, c);
if a > b then begin
if a > c then begin
writeln(a)
end
else begin
writeln(c)
end
end
else begin
if b > c then begin
writeln(b)
end
else begin
writeln(c)
end
end
end.
Что то на подобии этого