Движение равномерное т. к а=0
Всё берём из формулы: х=х (0)+скорость*время + а*время^2
модуль скорости1=12 м/с (пусть движется в направлении положительной оси)
модуль скорости2=10 м/с (тогда этот движется в противоположную сторону, т. к есть знак "-")
х (0)2 = 120, а х (0)1=0
второй движется навстречу 1ому
весь путь равен 120 м
скорость сближения=10+12=22 м/с
следовательно время, через которое они встретятся = 120/22=5,45 (с)
место встречи можно определить так:
за данное время 1ый проедет путь = 12*5,45 = 65,4 м
координата места встречи = 120 - 65,4 = 54,6 м
Объяснение:
вроде всё)
ответ:  Н
Н
Объяснение:
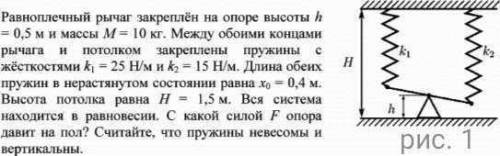
Полное условие задачи (с рисунком) представлено во вложении - рис. 1
Дано:
 м
м
 кг
кг
 Н/м
Н/м
 Н/м
Н/м
 м
м
 м
м
-------------------

Вначале несколько слов в стиле описательного момента.
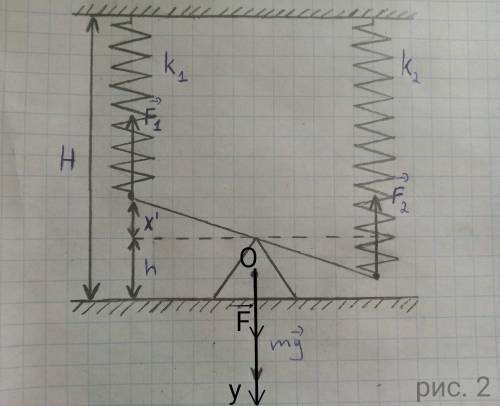
Согласно условию задачи, если у нас рычаг равноплечный и находиться в состоянии покоя, то из за того что пружины, подвешенные к его концам, растянуты, а их жесткости не равны между собой, можно сделать вывод, что их длинны, аналогично, не равны друг другу. Из за того что жесткость пружины  больше чем у
больше чем у  , то пружина
, то пружина
Где  - сила упругости пружины жесткостью
- сила упругости пружины жесткостью
 - сила упругости пружины жесткостью
- сила упругости пружины жесткостью


Где 

 и
и  - длины пружин, жесткостью и соответственно, в деформированном состоянии, при котором рычаг находиться в состоянии покоя.
- длины пружин, жесткостью и соответственно, в деформированном состоянии, при котором рычаг находиться в состоянии покоя.





 м
м
Как было отмечено раньше
Теперь пусть 
Отсюда

 Н
Н
Ну или

 Н
Н
Что еще раз подтверждает наши соображения
Если считать рычаг вместе с опорой одним целым телом то в проекции на ось

 Н
Н

3 и 4 так думаю но не знаю