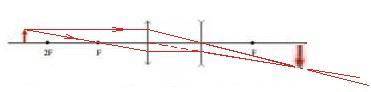
Объяснение: При построении использованы следующие закономерности: (См. рисунок)
1) Луч, падающий на линзу параллельно оптической оси, после положительной линзы идет через точку фокуса (верхний луч до отрицательной линзы).
Луч, падающий на отрицательную линзу параллельно оптической оси, после линзы луч надо провести так, как будто он идет из точки фокуса (нижний луч после положительной линзы).
2) Луч, идущий из точки (через точку) фокуса, после положительной линзы пойдет параллельно оптической оси (нижний луч до отрицательной линзы)..
3) Луч, идущий через оптический центр линзы (точка пересечения линзы с оптической осью), проходит без преломления (верхний луч после положительной линзы).
Предполагаем, что вес одного груза равен 1 Н.
Рис.1
На левом плече рычага: F₁ = 2 H; L₁ = 3 делениям
На правом плече рычага: F₂ = 3 H; L₂ = 2 делениям
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁ = 2 · 3 = 6 (H)
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂ = 3 · 2 = 6 (H)
Так как оба момента вращения равны по величине и противоположны по направлению, то рычаг будет находиться в равновесии.
Рис.2
Обе силы приложены к правому плечу рычага, но противоположны по направлению:
F₁ = 3 H; L₁ = 1,5 деления
F₂ = ? H; L₂ = 2,6 деления
Момент, который вращает рычаг против часовой стрелки:
M₁ = F₁L₁
Момент, который вращает рычаг по часовой стрелке:
M₂ = F₂L₂
Для получения положения равновесия рычага необходимо:
M₁ = M₂ => F₁L₁ = F₂L₂
Тогда:
F₂ = F₁L₁/L₂ = 3 · 1,5 : 2,6 ≈ 1,73 (H)
Судя по рисунку, динамометр показывает значение силы F₂ = 1 H.
Следовательно, в том случае, если динамометр жестко закреплен на подвесе, рычаг будет двигаться по часовой стрелке до тех пор, пока значение силы F₂ не достигнет значения ≈ 1,73 Н
Вывод: рычаг будет находиться в равновесии, если моменты вращения рычага по часовой стрелке и против нее будут равны по величине:
M₁ = M₂
Так как момент вражения рычага численно равен произведению силы, действующей на его плечо, и длины этого плеча, то условие равновесия рычага:
F₁L₁ = F₂L₂
На точность измерения результатов влияют:
погрешность измерения динамометра: ΔF = ± 0,1 H
погрешность измерения длины плеч рычага: ΔL = ± 0,5 дел.
в 2.