5.1) Действие активного гидролокатора основано на определении местоположения подводного объекта по световым сигналам, излучаемым самим объектом.
2) Гидролокатор определяет расстояние до объекта в толще воды основываясь на разнице между временем запуска сигнала и временем получения отраженного сигнала.
3) Гидролокатор определяет расстояние до объекта в толще воды, основываясь только на скорости рас звука в воде.
4) Применение эхолота шире, чем у гидролокатора.
5) Активный гидролокатор состоит из приемника и передатчика.
Объяснение:
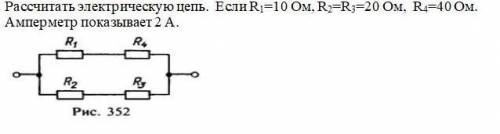
R₁₄=10+40=50 ОМ
R₂₃=20+20=40 ОМ
1/R=1/R₁₄+R₂₃=1/50+1/40=10/1000+25/1000=35/1000 (1/ОМ)
R=1000/35=28,8 ОМ
U=IR=2•28,8=57,6 В