1 .Подъемная рабочая платформа , также известное как воздушное устройство , подъемная рабочая платформа , автовышка или мобильная подъемная рабочая платформа ) представляет собой механическое устройство, используемое для обеспечения временного доступа людей или оборудования в труднодоступные места, обычно на высоте. Существуют различные типы механизированных платформ доступа, и отдельные типы могут также быть известны как «подъемник для сбора вишни» или «ножничный подъемник».
Они обычно используются для временного гибкого доступа, например, техническое обслуживание и строительство , или пожарными для аварийного доступа, что отличает их от оборудования постоянного доступа, такого как лифты .
2 .Revit Structure,Компас-3D,avtocad+advance
Объяснение:
Чтобы наш снаряд (пуля, мяч или что-то еще) попало в цель, нужно чтобы высота подъема снаряда совпала с высотой, на которой расположена цель, и чтобы дальность полета совпала с заданным расстоянием. Иначе снаряд может улететь выше или ниже цели или не долетать.
Воспользуемся формулами по равнозамедленному движению.
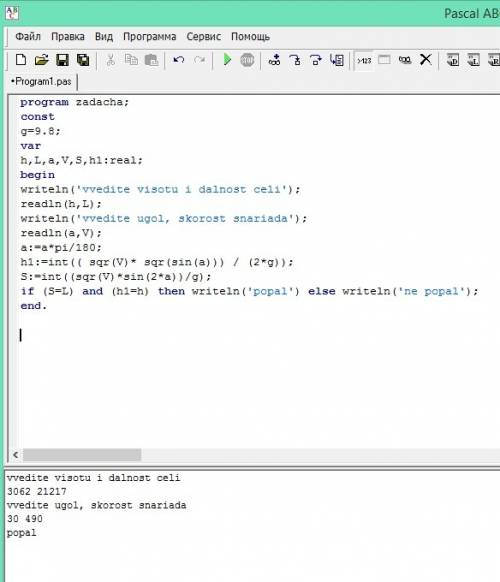
program zadacha;
const
g=9.8;
var
h,L,a,V,S,h1:real;
begin
writeln('vvedite visotu i dalnost celi');
readln(h,L);
writeln('vvedite ugol, skorost snariada');
readln(a,V);
a:=a*pi/180;
h1:=int(( sqr(V)* sqr(sin(a))) / (2*g));
S:=int((sqr(V)*sin(2*a))/g);
if (S=L) and (h1=h) then writeln('popal') else writeln('ne popal');
end.
В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с гусениц.