3. Устройством, позволяющим роботу определить расстояние до объекта и реагировать на движение, является... а)Ультразвуковой датчик
b)Датчик звука
c)Датчик цвета
d)Гироскоп
4. Сервомотор - это...
а)устройство для определения цвета
b)устройство для движения робота
c)устройство для проигрывания звука
d)устройство для хранения данных
6. Для подключения датчика к EV3 требуется подсоединить один конец кабеля к датчику, а другой...
a)к одному из входных (12,3,4) портов EV3
b)оставить свободную
c) к аккамулятору
d)к одному из выходных (A, B, C, D портов EV3
7. Для подключения сервомотора к EV3 требуется подсоединить один конец кабеля к сервомотору, а другой...
а)к одному из выходных (A, B, C, D)
b) портов EV3
в USB порт EV3
c)к одному из входных (1,2,3,4) портов EV3
d)оставить свободным
8.В ПО Lego EV3 G Блок «независимое управление моторами» управляет...
a)двумя сервомоторами
b)одним сервомотором
c)одним сервомотором и одним датчиком
9. Наибольшие ростояние , на которую утрализуется датчик Lego EV3можетобнаружить объект ...
a)50см
b)100cм
c)3м
d)250см
10. В Lego EV3 Gдля движения робота вперед с использованием двух сервомоторов нужно
а) задать положительную мощность мотора на блоке "Рулевого управления "
b )задать отрицательную мощность мотора на блоке "Рулевого управления "
с) задать положительную мощность мотора на блоке "
Большой мотор "
d)задать отрицательную мощность мотора на блоке "Большой мотор " дам 13 б
x + y > z
x + z > y
y + z > x
Программа:
var x, y, z: real;
begin
writeln('Введите стороны треугольника x, y, z: ');
read(x, y, z);
if (x + y > z) and (x + z > y) and (y + z > x)
then writeln('Треугольник существует')
else writeln('Треугольник не существует');
end.
2. Думаю, здесь излишни объяснения.
Программа:
var x, y, z: real;
begin
writeln('Введите три числа: ');
read(x, y, z);
writeln('В интервале (1; 3) лежат числа: ');
if (x > 1) and (x < 3) then writeln(x);
if (y > 1) and (y < 3) then writeln(y);
if (z > 1) and (z < 3) then writeln(z);
end.
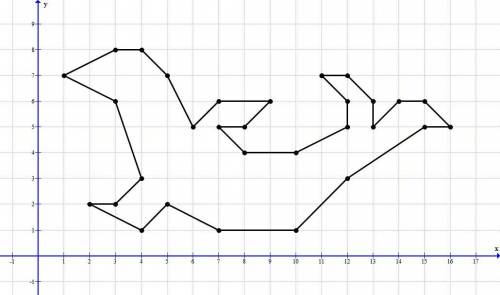
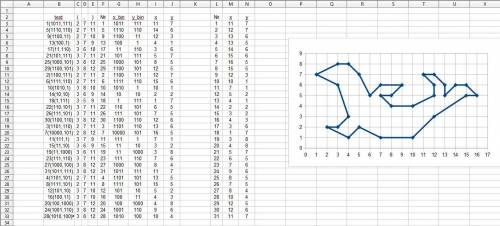
Блок-схемы в приложении: