Begin writeln('Введите первое число'); readln(a); writeln('Введите второе число'); readln(b);
if (a<0) and (b<0) then Begin a:=a+2; b:=b+2; writeln('a = ',a); writeln('b = ',b); end else if (a>0) and (b<0) then writeln('a*b = ',a*b) else if (a<0) and (b>0) then writeln('b-a = ', b-a)
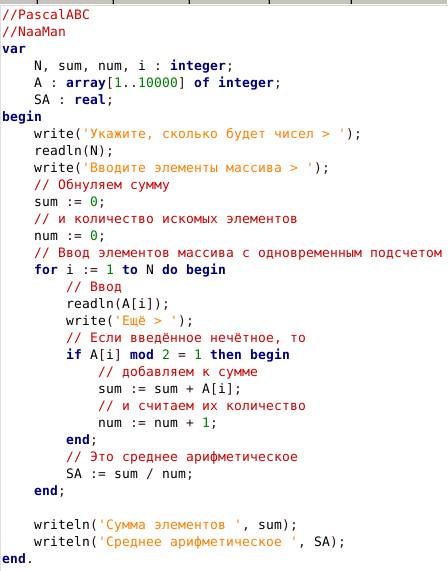
//PascalABC //NaaMan var N, sum, num, i : integer; A : array[1..10000] of integer; SA : real; begin write('Укажите, сколько будет чисел > '); readln(N); write('Вводите элементы массива > '); // Обнуляем сумму sum := 0; // и количество искомых элементов num := 0; // Ввод элементов массива с одновременным подсчетом for i := 1 to N do begin // Ввод readln(A[i]); write('Ещё > '); // Если введённое нечётное, то if A[i] mod 2 = 1 then begin // добавляем к сумме sum := sum + A[i]; // и считаем их количество num := num + 1; end; // Это среднее арифметическое SA := sum / num; end;
writeln('Сумма элементов ', sum); writeln('Среднее арифметическое ', SA); end.
Скетч программы:
//Скетч для простого выталкивания соперника с ринга
//робот сразу после старта поворачивает на 135 градусов
//и если не находит соперника, то крутится направо
//подключаем «ноги»
//определяем соответствие контактов микроконтролера
//и контакам драйвера двигателей TB6612FNG
#define PWMA 3
#define AIN1 1
#define AIN2 0
#define BIN1 2
#define BIN2 7
#define PWMB 9
//включаем «глаза» для поиска соперника
//объявляем переменные, содержащие значения
//аналоговых портов микроконтроллера, подключаемых
//к ИК датчикам Sharp
int front_eye = A0;
int left_eye = A1;
int right_eye = A8;
//включем «глаза» для определения, на ринге мы находимся
//или выехали за него
//объявляем переменные, содержащие значения
//аналоговых портов, подключенных к датчикам
//QTR-1A
int left_bw = A6;
int right_bw = A11;
//процедура инициации портов
void setup()
{
//инициируем переменные моторов
pinMode(PWMA,OUTPUT);
pinMode(AIN1,OUTPUT);
pinMode(AIN2,OUTPUT);
pinMode(PWMB,OUTPUT);
pinMode(BIN1,OUTPUT);
pinMode(BIN2,OUTPUT);
//ждем 5 секунд
delay(5000);
// делаем повопрот на 135 градусов
//левый мотор по направлению движения робота
//(против часовой стрелки)
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
analogWrite(PWMA, 255);
//Правый мотор против направления движения робота
//(против часовой стрелки)
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
analogWrite(PWMB, 255);
delay(100); // длительность задержки определяет
//угол поворота робота
//и подбирается экспериментально в зависимости
//от веса робота, моторов и колес
//останавливаем моторы
digitalWrite(AIN1,HIGH);
digitalWrite(AIN2,HIGH);
digitalWrite(PWMA,LOW);
digitalWrite(BIN1,HIGH);
digitalWrite(BIN2,HIGH);
digitalWrite(PWMB,LOW);
delay(10);
}
void loop()
{
//проверяем наличие препятствия фронтальным датчиком
//на расстоянии ближе 40 см
//(значение analogRead() — 333 по таблице)
if(analogRead(front_eye) > 333){
//левый мотор по направлению движения робота
//(против часовой стрелки)
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
analogWrite(PWMA, 255);
//Правый мотор по направления движения робота
//(по часовой стрелке)
digitalWrite(BIN1, HIGH);
digitalWrite(BIN2, LOW);
analogWrite(PWMB, 255);
delay(100); // длительность задержки 0.1 секунда
}
else if(analogRead(left_eye) > 333){// если соперник
//не найден спереди то проверяем слева
//если соперник слева найден поворачиваем налево
//на 90 градусов
//левый мотор против направлению движения
//робота (по часовой стрелки)
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 255);
//Правый мотор по направлению движения
//робота (по часовой стрелки)
digitalWrite(BIN1, HIGH);
digitalWrite(BIN2, LOW);
analogWrite(PWMB, 255);
delay(60); // длительность задержки
//определяет угол поворота робота
//и подбирается экспериментально в
//зависимости от веса робота, моторов и колес
//левый мотор по направлению движения робо//(против часовой стрелки)
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
analogWrite(PWMA, 255);
//Правый мотор против направления движения робота
//(против часовой стрелки)
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
analogWrite(PWMB, 255);
delay(130); // длительность задержки определяет
//угол поворота робота
//и подбирается экспериментально в зависимости
//от веса робота, моторов и колес
//конец цикла loop — идем на начало цикла и проверяем расстояние спереди
Все операторы в данном скетче нами уже изучались, поэтому трудностей в его понимании, надеюсь, не возникнет.
Объяснение: