Объяснение:
Датчики являются элементом технических систем, предназначенных для измерения, сигнализации, регулирования, управления устройствами или процессами. Датчики преобразуют контролируемую величину (давление, температура, расход, концентрация, частота, скорость, перемещение, напряжение, электрический ток и т. п.) в сигнал (электрический, оптический, пневматический), удобный для измерения, передачи, преобразования, хранения и регистрации информации о состоянии объекта измерений.
Исторически и логически датчики связаны с техникой измерений и измерительными приборами, например термометры, расходомеры, барометры, прибор «авиагоризонт» и т. д. Обобщающий термин датчик укрепился в связи с развитием автоматических систем управления, как элемент обобщенной логической концепции датчик — устройство управления — исполнительное устройство — объект управления. В качестве отдельной категории использования датчиков в автоматических системах регистрации параметров можно выделить их применение в системах научных исследований и экспериментов.
Датчики являются элементом технических систем, предназначенных для измерения, сигнализации, регулирования, управления устройствами или процессами. Датчики преобразуют контролируемую величину (давление, температура, расход, концентрация, частота, скорость, перемещение, напряжение, электрический ток и т. п.) в сигнал (электрический, оптический, пневматический), удобный для измерения, передачи, преобразования, хранения и регистрации информации о состоянии объекта измерений.
Исторически и логически датчики связаны с техникой измерений и измерительными приборами, например термометры, расходомеры, барометры, прибор «авиагоризонт» и т. д. Обобщающий термин датчик укрепился в связи с развитием автоматических систем управления, как элемент обобщенной логической концепции датчик — устройство управления — исполнительное устройство — объект управления. В качестве отдельной категории использования датчиков в автоматических системах регистрации параметров можно выделить их применение в системах научных исследований и экспериментов
попробуй
programm dima;
var
m1:array[1..50]of integer;
m2:array[1..50]of integer;
n1,n2,i:integer;
arifm1,arifm2:real;
begin
writeln('Vvedite rozmeri masivov');
readln(n1,n2);
randomize;
writeln('Masiv 1:');
for i :=1 to n1 do
begin
m1[i]:=random(50);
write(m1[i],' ');
end;
writeln;
writeln('Masiv 2:');
for i:=1 to n2 do
begin
m2[i]:=random(60);
write(m2[i],' ');
end;
for i :=1 to n1 do
arifm1:= arifm1+m1[i];
arifm1:=arifm1/n1;
for i :=1 to n2 do
arifm2:= arifm2+m2[i];
arifm2:=arifm2/n2;
writeln;
if arifm1=arifm2 then
writeln('seredne arifmetichne rovnie')
else
if arifm1>arifm2 then
writeln('seredne arifmetiche 1 masiva bilche')
else
writeln('seredne arifmetiche 2 masiva bilche');
end.
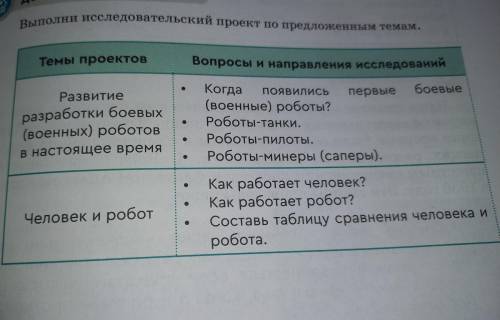
1 Тема) Когда появились первые боевые роботы?
В 1910 году, вдохновлённый успехами братьев Райт, молодой американский военный инженер из Огайо Чарльз Кеттеринг предложил использовать летательные аппараты без человека. По его замыслу управляемое часовым механизмом устройство в заданном месте должно было сбрасывать крылья и падать как бомба на врага. Получив финансирование армии США, он построил, и с переменным успехом испытал несколько устройств, получивших названия The Kattering Aerial Torpedo, Kettering Bug (или просто Bug), но в боевых действиях они так и не применялись.
Объяснение:
Как то так