Гироскопический датчик предназначен для измерения угла вращения робота или скорости вращения. Сверху на корпусе датчика нанесены две стрелки, обозначающие плоскость, в которой работает датчик. Поэтому важно правильно установить датчик на робота. Также для более точного измерения крепление гироскопического датчика должно исключать его подвижность относительно корпуса робота. Даже во время прямолинейного движения робота гироскопический датчик может накапливать погрешность измерения угла и скорости вращения, поэтому непосредственно перед измерением следует осуществить сброс в 0 текущего показания датчика. Вращение робота против часовой стрелки формирует отрицательные значения измерений, а вращение по часовой стрелке - положительные.
Объяснение:
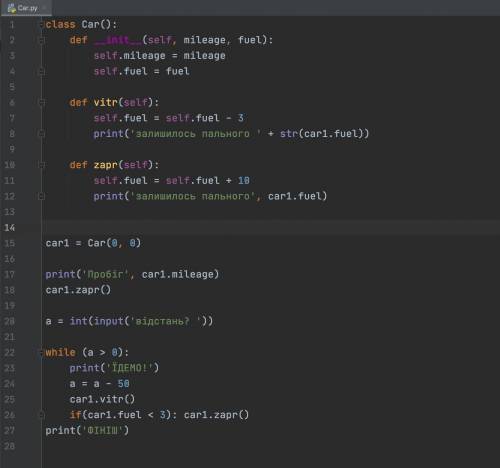
Код:
class Car():
def __init__(self, mileage, fuel):
self.mileage = mileage
self.fuel = fuel
def vitr(self):
self.fuel = self.fuel - 3
print('залишилось пального ' + str(car1.fuel))
def zapr(self):
self.fuel = self.fuel + 10
print('залишилось пального', car1.fuel)
car1 = Car(0, 0)
print('Пробіг', car1.mileage)
car1.zapr()
a = int(input('відстань? '))
while (a > 0):
print('ЇДЕМО!')
a = a - 50
car1.vitr()
if(car1.fuel < 3): car1.zapr()
print('ФІНІШ')
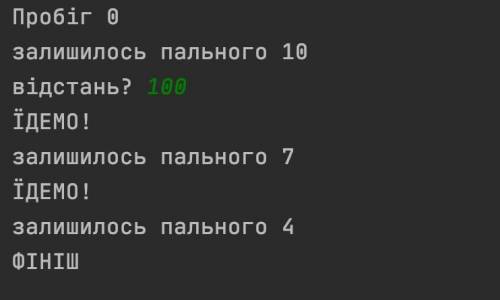
Вывод:
Пробіг 0
залишилось пального 10
відстань? 100
ЇДЕМО!
залишилось пального 7
ЇДЕМО!
залишилось пального 4
ФІНІШ
t=60сек
d=8000Гц
I=60сек*8000Гц*16бит*1=7680000бит=937,5Кб