ответ:Gyro сенсоры - роботтың айналу бұрышын немесе айналу жылдамдығын өлшеуге арналған. Датчик корпусының жоғарғы жағында сенсор жұмыс істейтін жазықтықты көрсететін екі көрсеткі бар. Сондықтан сенсорды роботқа дұрыс орнату маңызды.
Объяснение:Гироскопический датчик-предназначен для измерения угла вращения робота или скорости вращения. Сверху на корпусе датчика нанесены две стрелки, обозначающие плоскость, в которой работает датчик. Поэтому важно правильно установить датчик на робота.
Первый текст на казахском а второй на русском :)
li = []
elements = 1
negative_index = 0
positive_index = 0
print("Введите 0 что бы остановить ввод")
while elements != 0:
elements = int(input("Введите элементы списка\n"))
li.append(elements)
li2 = li[:]
li2.sort()
length = li.__len__()
print(li)
for i in range(0, length-1):
for j in range(length-1, 1, -1):
if li2[i] * (-1) == li2[j]:
for k in range(0, length-1):
if li2[i] == li[k]:
negative_index = k
if li2[j] == li[k]:
positive_index = k
if negative_index < positive_index:
print("Индекс противоположного числа(1) ->", negative_index)
print("Индекс противоположного числа(2) ->", positive_index)
elif negative_index == positive_index == 0:
exit(0)
else:
print("Индекс противоположного числа(1) ->", positive_index)
print("Индекс противоположного числа(2) ->", negative_index)
P.S
Код не идеальный, но задачу выполняет
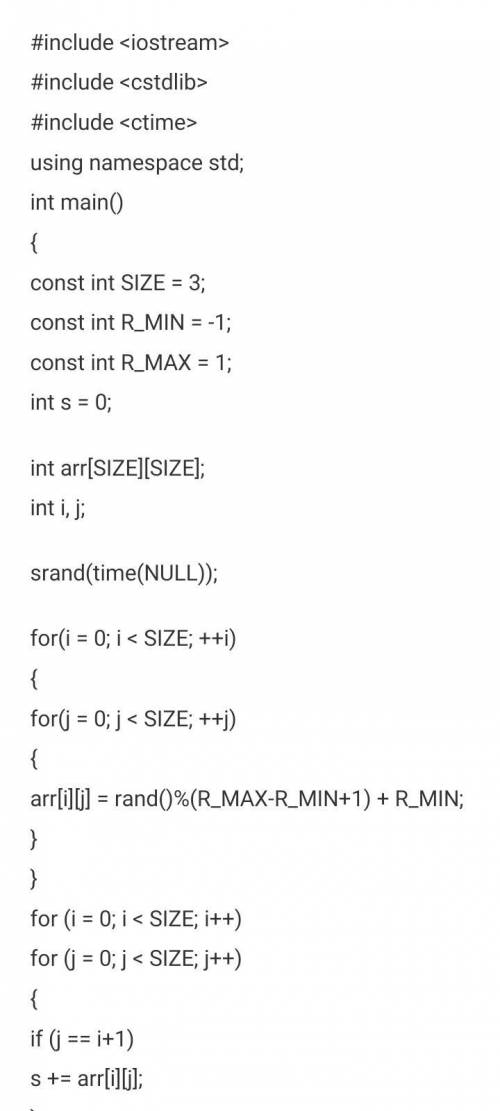
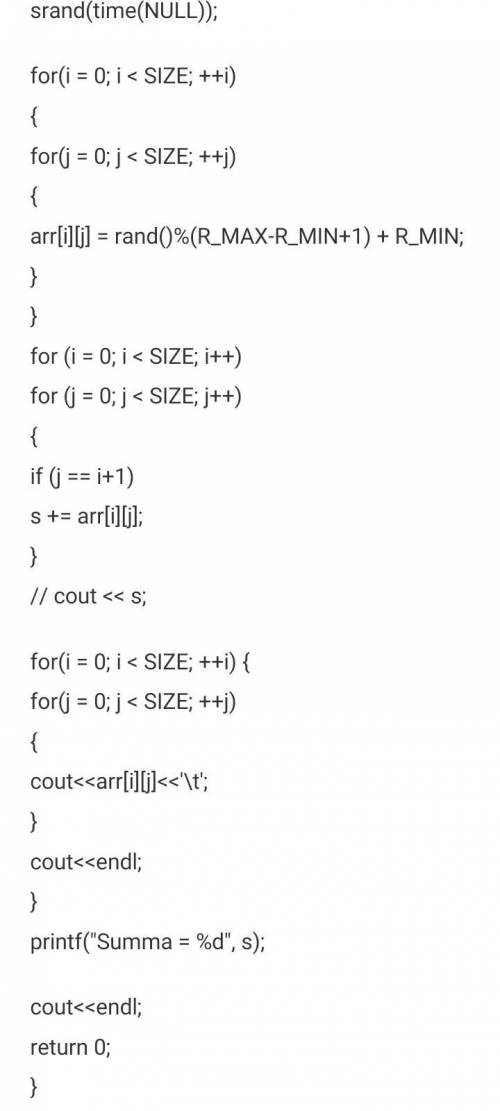
Ошибка у тебя в подсчёте суммы, посчитать ее мы можем даже не используя if'а, просто с двух циклов.
#include<iostream>
#include<ctime>
#define SIZE 10
#define R_MIN -1
#define R_MAX 1
using namespace std;
int main()
{
srand(time(NULL));
int arr[SIZE][SIZE];
int s = 0;
for (int i = 0; i < SIZE; ++i)
for (int j = 0; j < SIZE; ++j)
arr[i][j] = rand() % (R_MAX - R_MIN + 1) + R_MIN;
for (int i = 0; i != SIZE; i++)
for (int j = i + 1; j != SIZE; j++)
s += arr[i][j];
for (int i = 0; i < SIZE; ++i) {
for (int j = 0; j < SIZE; ++j)
{
cout << arr[i][j] << " ";
}
cout << endl;
}
cout << "Summa = " << s;
return 0;
}